Ein Paar Bilder im Flug...



| Der Quadrokopter |
|
Ein Paar Bilder im Flug...
|
| . |
| Der Prototyp |
| Wenn dieser Abschnitt "Der Prototyp" zu breit erscheint mit zu großen Bildern, dann liegt das höchstwahrscheinlich an dem seltsamen Verhalten des Internet-Explorers... |
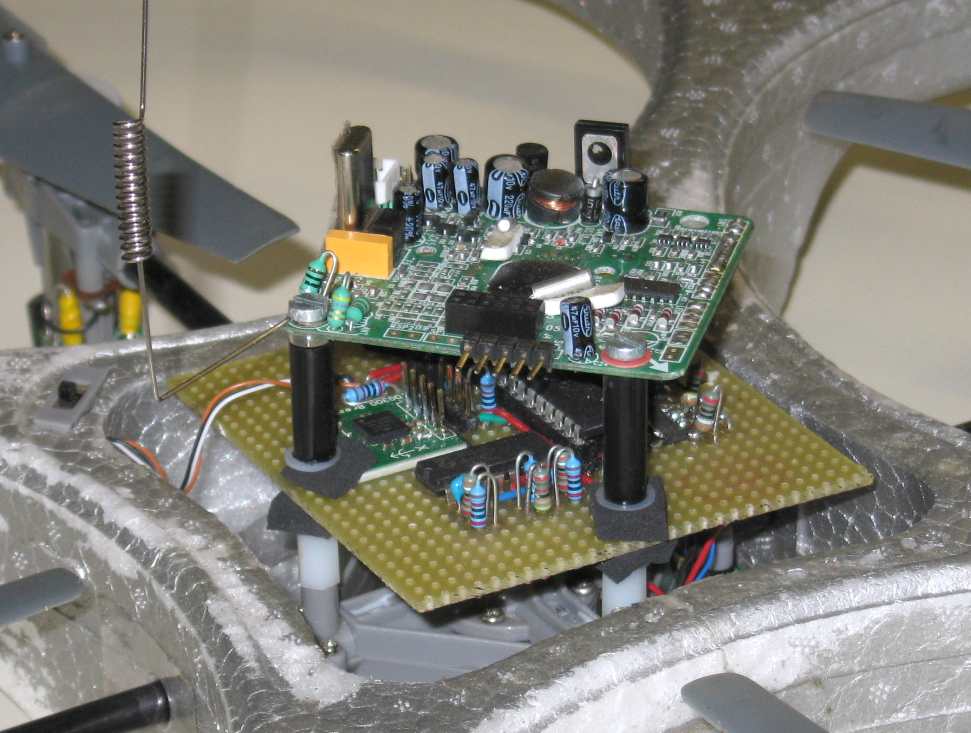
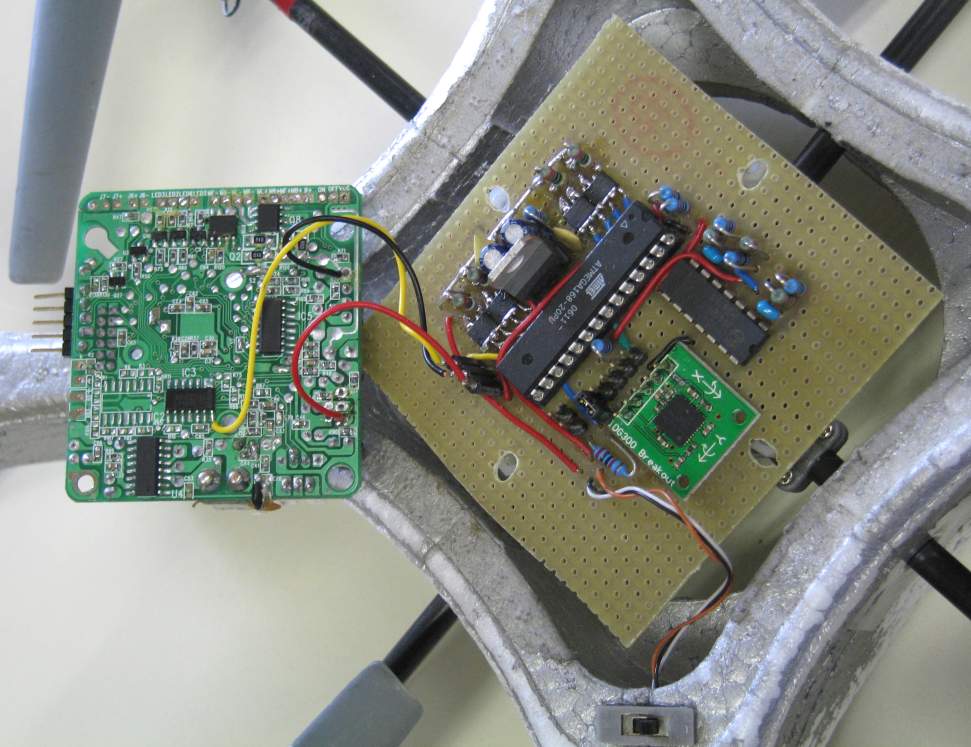
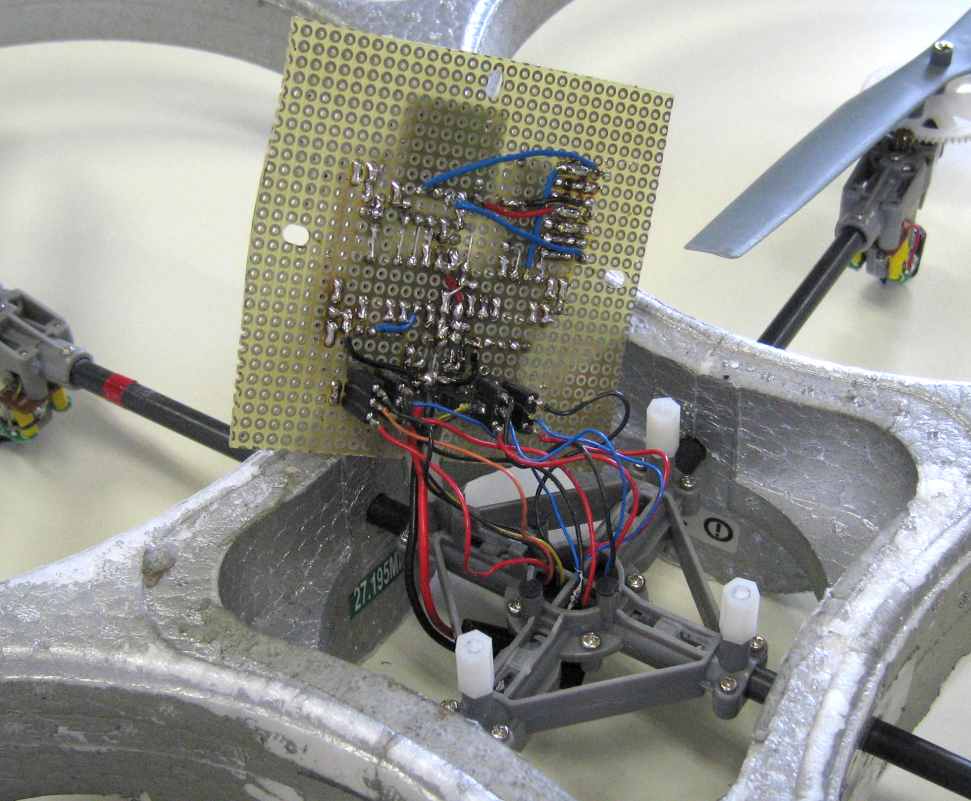
| Der erste Prototyp der Schaltung wurde auf eine Lochrasterplatine gelötet. Hier sitzt der Prototyp im Stapel unter der Originalplatine. Die obere Originalplatine wird nur noch als Empfänger genutzt: | Das ganze noch einmal mit dem selbst hergestellten Programmierkabel für die parallele Schnittstelle: |

|

|
| Und nun die Platinen etwas näher. Die mechanische Entkopplung der Platine vom Ufo ist wegen der Schwingungen durch die Motoren dringend notwendig. Hier wurde übliches Moosgummi benutzt: | Hier der Stapel aufgeklappt: Links ist die Originalplatine von unten zu sehen. Die 3 Drähte sind die Stromversorgung für den Empfänger und gelb das empfangene PPM Signal zur Auswertung: |
|
|
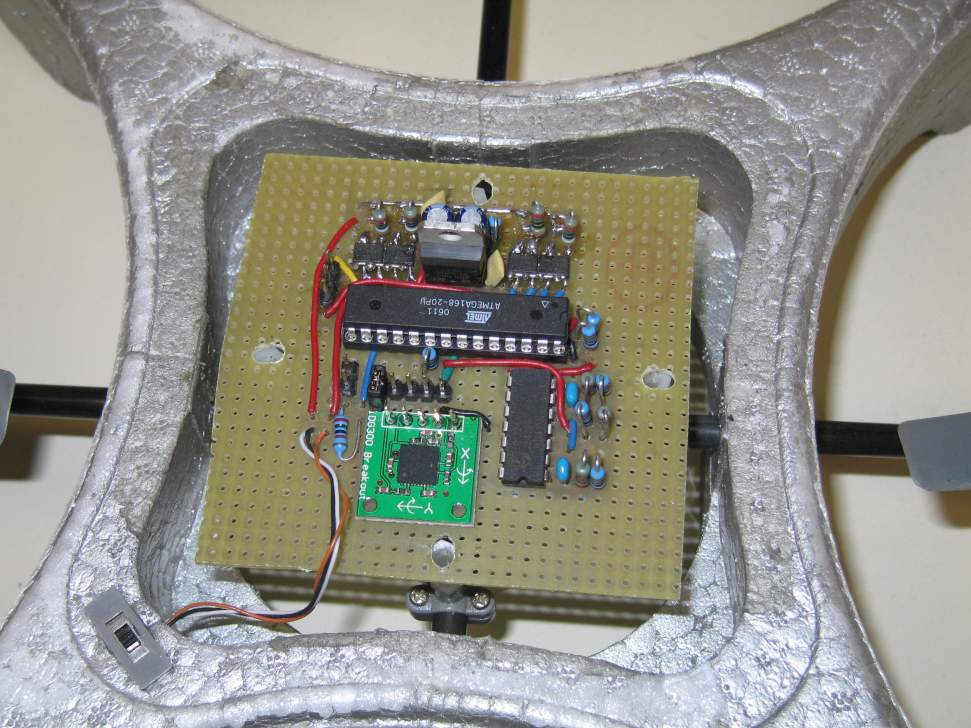
| Hier ist die Platine in Großaufnahme zu sehen; der Empfänger ist nicht mehr angeschlossen. Unten in grün ist der 2-Achsige IDG300 zu sehen. Auf den Bildern fehlt der ADXRS für die Hochachse noch. Rechts neben dem IDG300 sitzt der 4-fach Operationsverstärker. Darüber quer ist der Mikrocontroller AtMega168 zu sehen. Ganz oben in der Mitte sitzt die Stromversorgung, die aus den etwa 12 V Akkuspannung die 3,3 V für die restliche Schaltung macht (für den ADXRS sind dann auch noch 5 V notwendig). Flankiert wird der Spannungsregler von den Mosfets für die 4 Motoren und die 4 Leuchtdioden: | Von unten sieht man, daß bei diesem Prototypen alles gesteckt ist, auch die Anschlüsse für die Motoren, LEDs usw. Auch wenn es bei den Versuchen keine Wackelkontakte oder abgefallene Stecker gegeben hat, so wird die fertige Version zur SIcherheit doch fest gelötet. Das spart auch Platz, so daß die weißen Distanzstücke entfallen können, für die hier extra ein M3 Gewinde in das Ufo geschnitten wurde: |
|
|
| . |
| Die fertige Platine |
|
Nachdem der Prototyp fehlerfrei funktioniert hat, wurde mit Eagle eine "richtige" Platine entwickelt und bei Olimex in Auftrag gegeben. Bestückt sieht das ganze folgendermaßen aus. Auch hier fehlt wieder der ADXRS, der in Form des ADXRS300-EB unter den Elkos und neben dem IDG300 Platz findet: 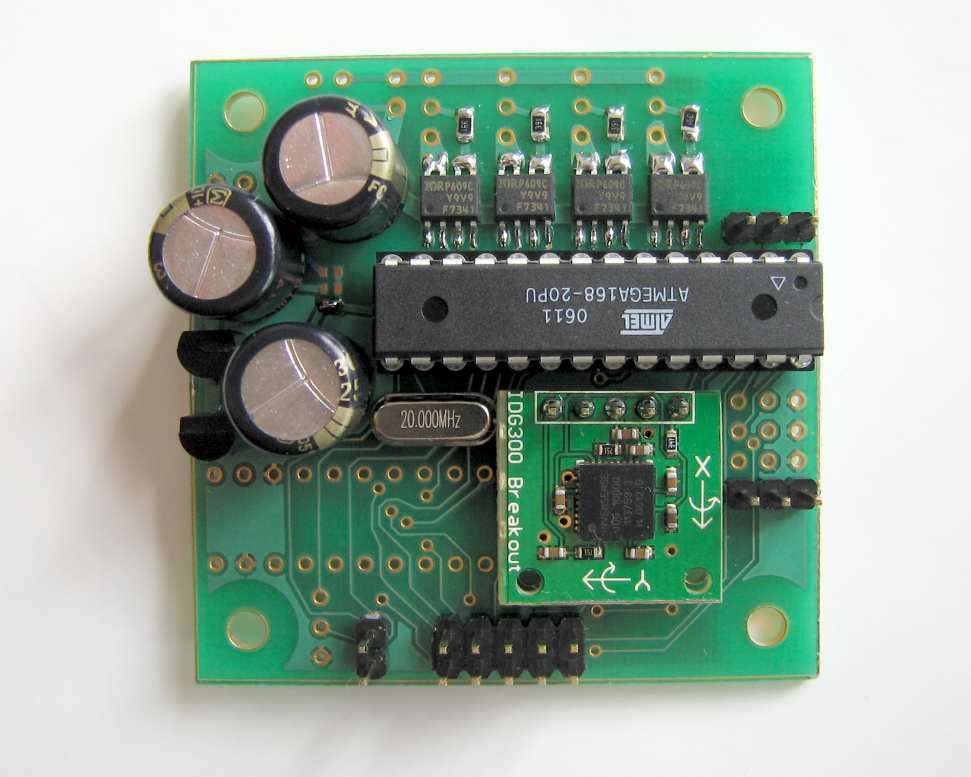
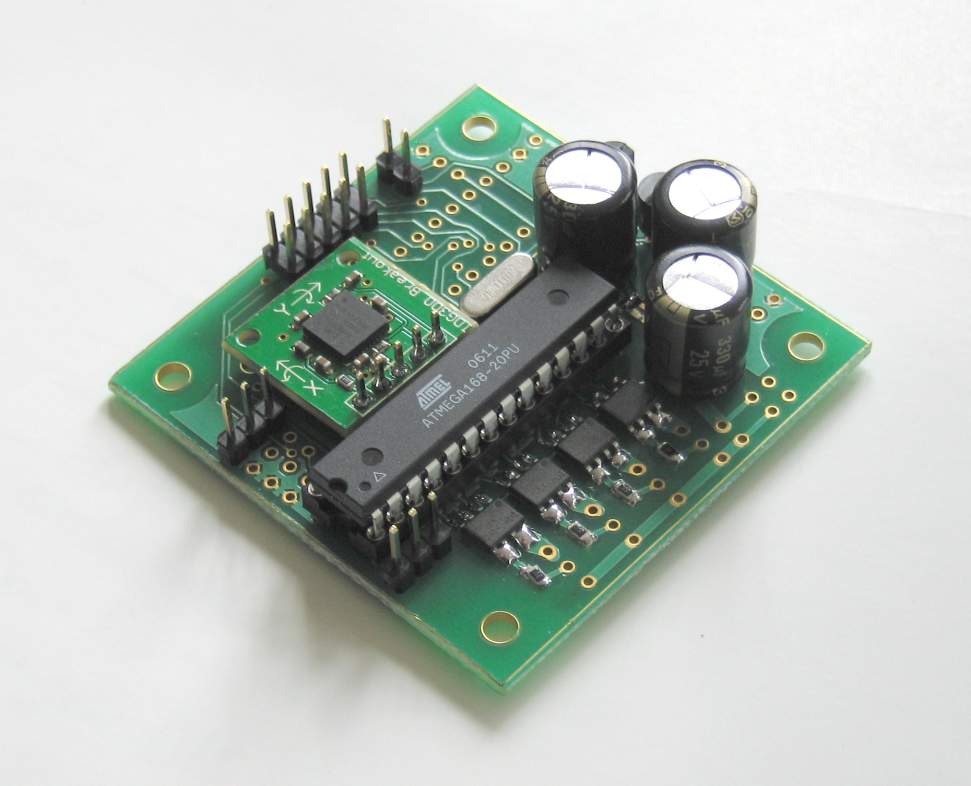 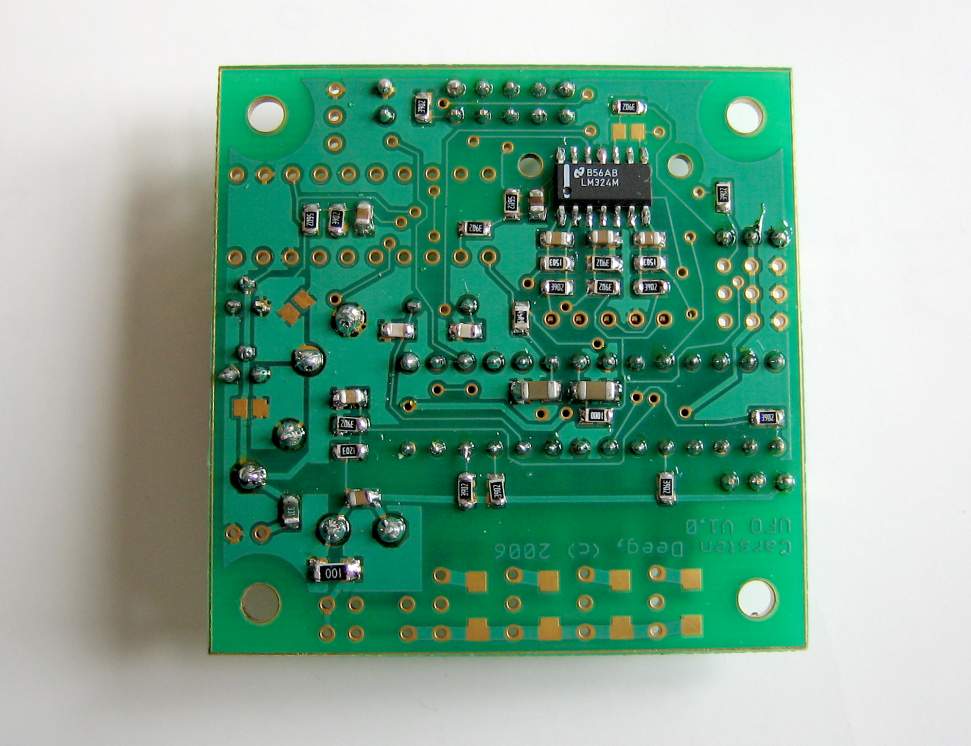
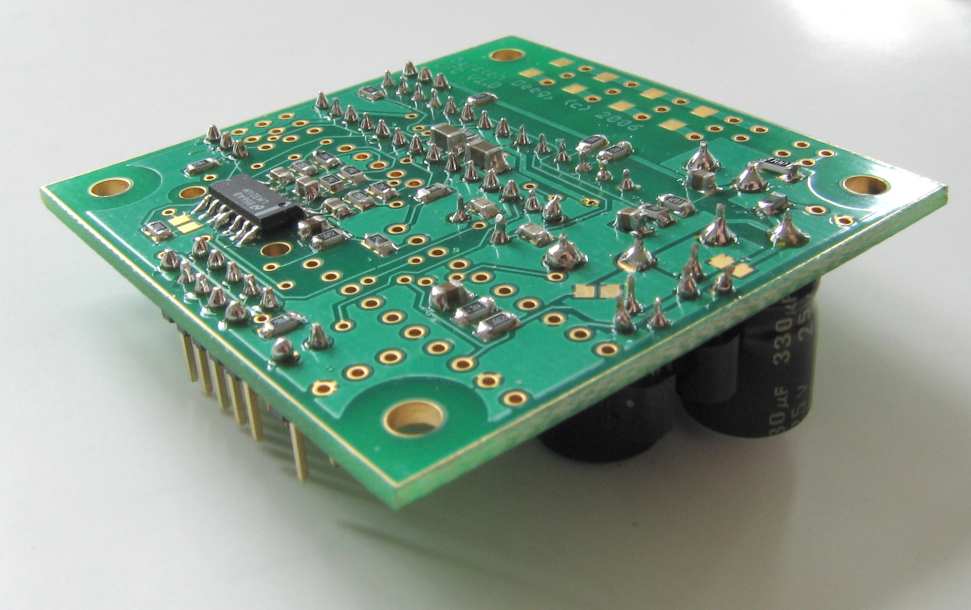
Auf dem Bild oben links kann man die einzelnen Komponenten erkennen: Die großen Elkos sind zur Glättung der Versorgungsspannung, zugegebenermaßen recht großzügig ausgelegt. Die beiden kleinen Festspannungsregler am linken Rand machen aus den etwa 12 V Akkuspannung 3,3 V und 5 V. Ganz oben sind die Mosfets für die Motoren und die Leuchtdioden zu sehen, darunter wieder der AtMega. Der 20 MHz Quarz erhöht die mögliche Taktfrequenz von den intern möglichen 8 MHz des AtMega. Ganz oben sind die Lötaugen für die Motor- und die Leuchtdioden-Anschlußleitungen noch frei. Rechts über dem AtMega ist der RS232-Anschluß für den ACT-Empfänger. Rechts unter dem AtMega sind die Anschlüsse für die 4 Servoeingänge nicht bestückt, da sie wegen des ACT-Empfängers nicht benötigt werden. Lediglich ein Anschluß ist vorhanden, der zur Stromversorgung des Empfängers verwendet wird. Hierüber kann außerdem das vollständige PPM mit allen Kanälen angeschlossen werden. Ganz unten auf der Platine ist der Programmieranschluß zu sehen. Links davon befinden sich die Pins für den Jumper, der gesetzt werden kann, um die Fernbedienungskalibration auszuführen. Auf der Platinenunterseite (Bild unten links) befindet sich der Operationsverstärker mit seiner Beschaltung. Und falls sich jemand fragt, warum ich so große Bauteile benutze: Sie sind teilweise leichter zu bekommen, und vor allem leichter zu löten ;-). Und da eine kleinere Platine wegen der vorgegebenen Schraubenpositionen sowieso nichts bringt, gibt es keinen Grund für eine unnötige Miniaturisierung. |
| . |
| Platine eingebaut im Ufo |
|
Hier nun das ganze fertig montiert im Ufo: 
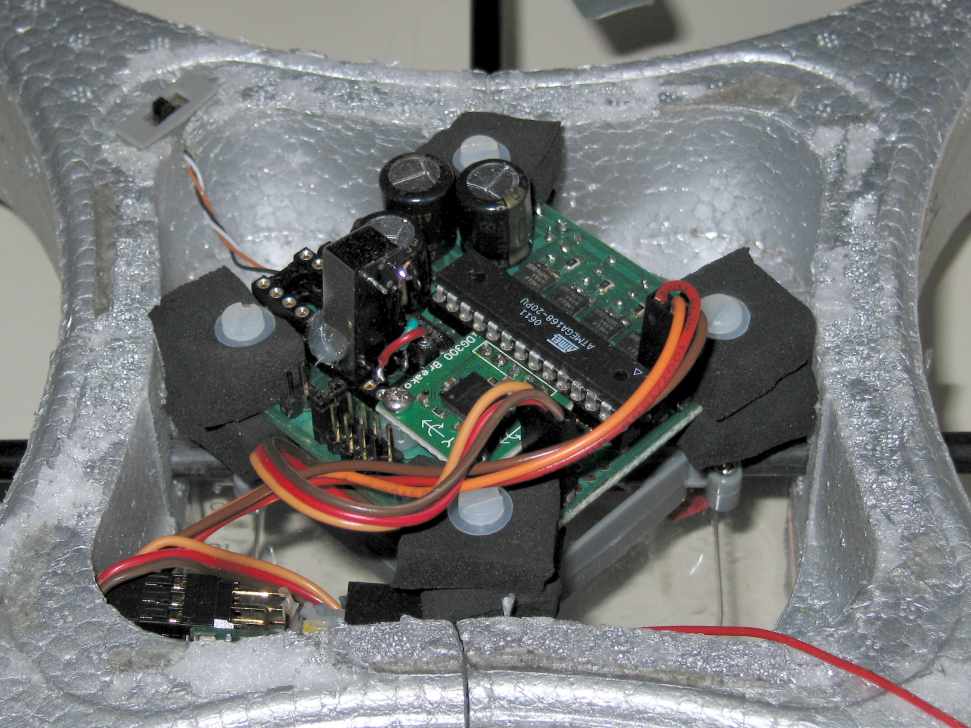
Im linken Bild ist die Version mit dem ADXRS zu sehen, ser links unter den Elkos sitzt. Es wurde der original X-Ufo Schalter verwendet (oben links zu sehen). Links in der Seite befindet sich der Empfänger ACT DSL-4ST, der über die Kabel mit der Platine verbunden ist. Wie an der grünen Antenne oben rechts zu identifizieren ist, handelt es sich hier um einen 40 MHz Empfänger.
Das rechte Bild zeigt eine Version mit dem aufrecht stehenden Tokin Sensor für die Hochachse. Die wesentliche Einschränkung
liegt in der beschränkung der Drehrate auf nach Datenblatt ±90°/s. Für eine Stabilisierung reicht das aber vollkommen
aus und auch schnellere Drehungen sind möglich, sie lassen sich nur nicht mehr genau vom Regler kontrollieren. Der kann erst dann wieder
"richtig" arbeiten, wenn die Drehrate klein genug ist. Das funktionierte in Versuchen sehr gut. Am auffälligsten dürfte die mechanische Entkopplung sein, die rechts mittels großer Moosgummi-Elemente realisiert wurde. Die ganz einfache Variante vom linken Bild ist recht schwierig in den Griff zu bekommen, da die Gyros doch recht Vibrationsempfindlich reagieren. Im rechten Bild ist das ganze eher etwas übertrieben, so daß ein sinnvoller Kompromiß irgendwo in der Mitte liegen dürfte. |
| . |
| Videos |
| Das erste Video wurde mit einem einfachen Digitalfotoapparat gemacht, was die bescheidene Bildwiederholrate und die Kameraführung erklärt. Außerdem gibt es keinen Ton. Bis auf die durch den Umbau gewonnene Agilität ist hier nichts besonderes zu sehen. Die weiche Landung zeigt, daß das Ufo auch ruhig gehalten werden kann. Das tut es dann allerdings weitgehend selbst, dafür ist ja die Regelung da... | AVI (820kB) |
| Über Betonboden fliegt es sich doch gleich ganz anders! ;-) Ansonsten gibt es hier überraschenderweise auch Bäume mit Zweigen, in die man hineinfliegen kann. Aber alles kein Problem, wenn man Ruhe bewahrt. Das Beschleunigen und Abbremsen geht auch hier gut. Die Landung kann aber noch schöner werden. | AVI (1,9MB) |
| Wie man hier sieht, geht auch ein wildes Taumeln problemlos. Was man davon hat, außer Zuschauer zu verunsichern, weiß ich allerdings auch nicht. Und dann waren es auf einmal zwei! Beide mit fast gleicher Ausstattung: nur einer mit ADXRS- und der andere mit Tokin-Stabilisierung der Hochachse. | AVI (1,9MB) |
| Hier noch ein ruhigeres Video, bei dem man den Ufos in Ruhe zusehen kann. Und wenn man nicht aufpasst, dann sind 2 Ufos in der Luft schon eines zu viel. Aber auch hier gilt: Keine Panik, der Boden ist weit! | AVI (1,4MB) |
|
Und ja: Ein Looping bzw. eine Rolle ist machbar. Ich hab nur noch kein Video davon... Zu den Windverhältnissen: Bei Windstärke 5 mit Böen von 6-7 sind wir auch schon mit viel Spaß geflogen. |
Zu meiner Quadrokopterseite
Zu meiner Hauptseite
Letzte Aktualisierung: 04.10.2006
© Carsten Deeg